
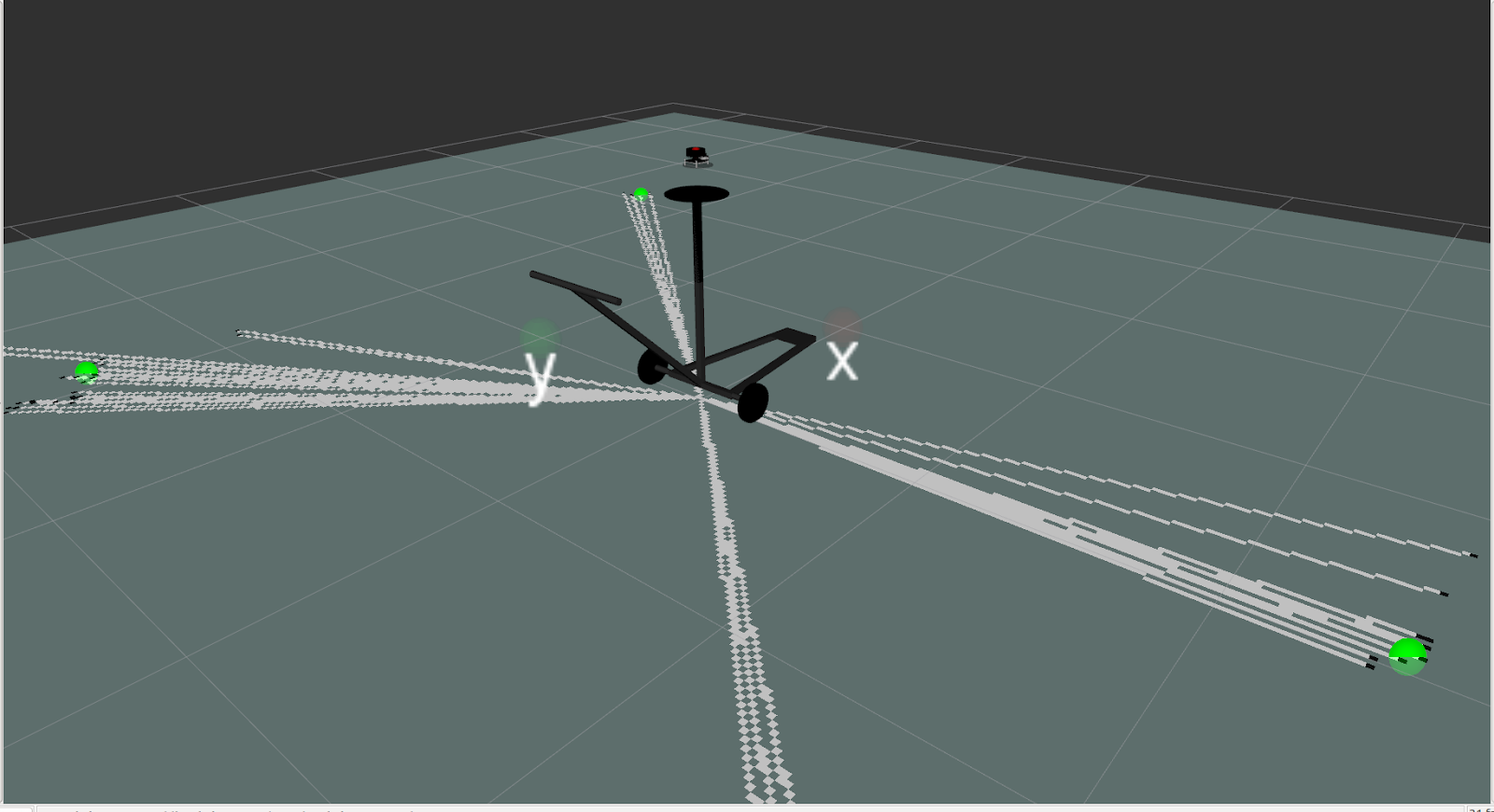
Handheld robot to measure foliage and/or count trees in horticulture fields using a 2D Lidar, IMU, and odometry(wheel or visual odometry for using untethered from ground). It can be mounted on any agricultural machinery or be mounted on a hand-cart(as shown below).
As shown in the Application Interface below, RViz is used for displaying the lidar scan data, mapping data, as well as the detected tree trunks in bottom left corner.
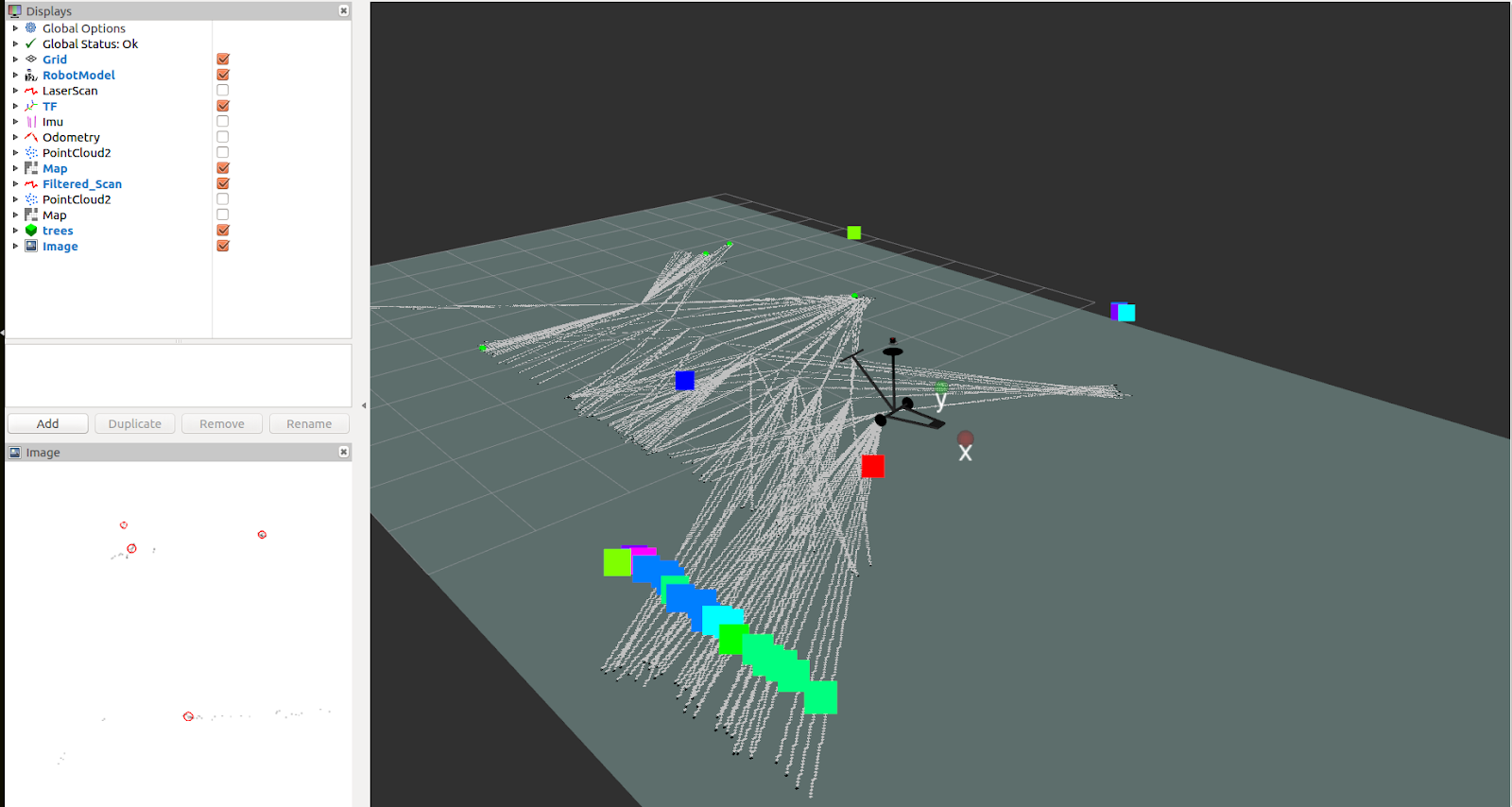
OpenCV is used to detect tree trunks by using SimpleBlobDetector used to Extracted blobs by circularity and areas.
prajankya/AgriMapper
A Precision Horticulture 2D Vegetation
Mapping Robot - prajankya/AgriMapper
 GitHub
GitHub