This tool helps in calculating Transformation matrices often required when working on Serial Robots for kinematics/control/dynamics. It uses the most common method of representing joints and links, i.e. DH parameters. Please follow along the steps to use it for your application.
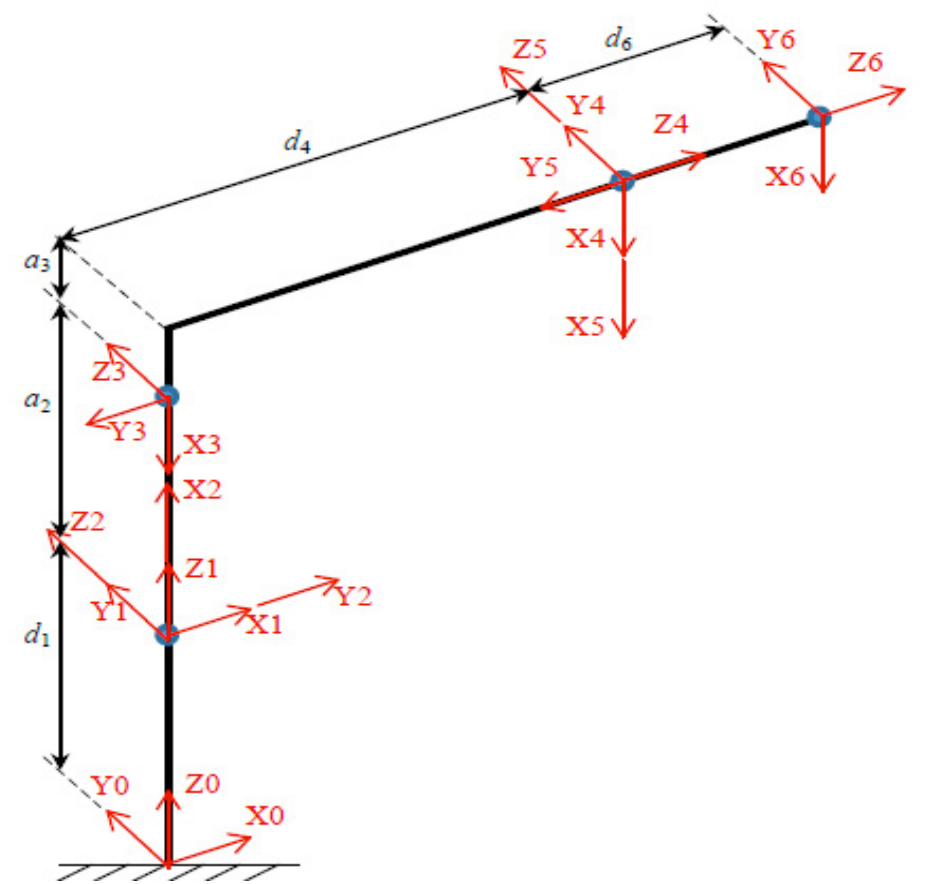
Step 1: Define Z Axis
Choose zi along the axis of motion of the i+1th link.
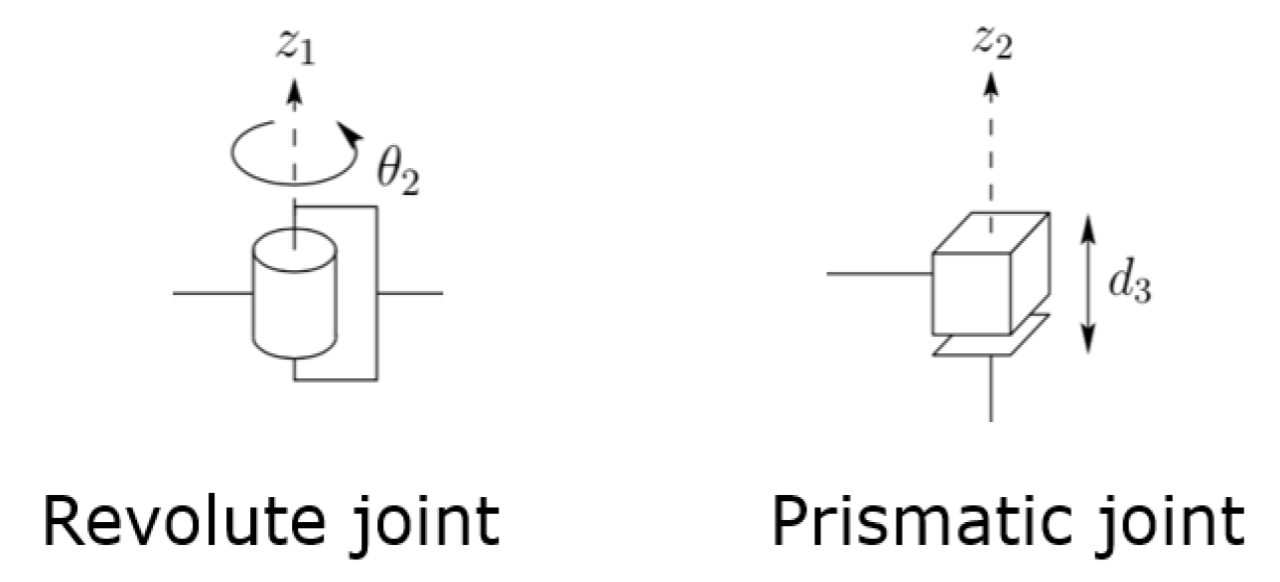
Go along all the Joints in the Robot and define Z axis for each joint as shown above.
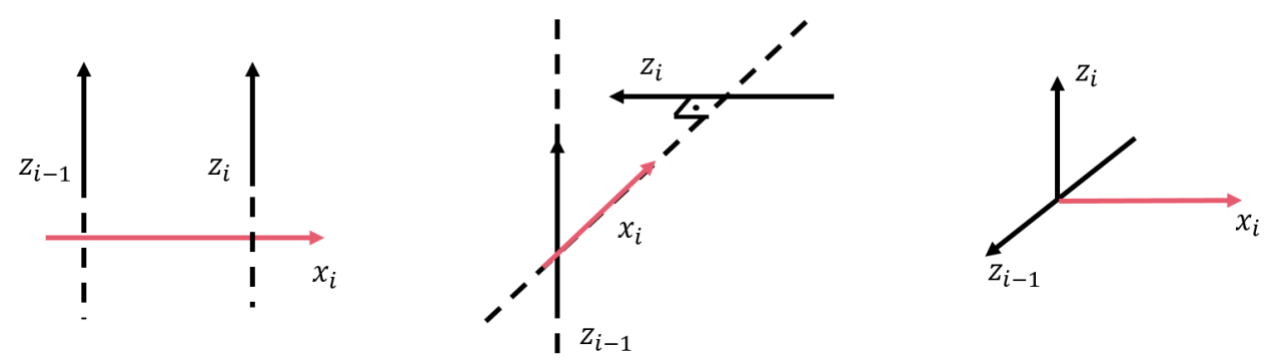
Step 2: Define X Axis
Choose xi such that it is the shortest vector between zi-1 and zi.
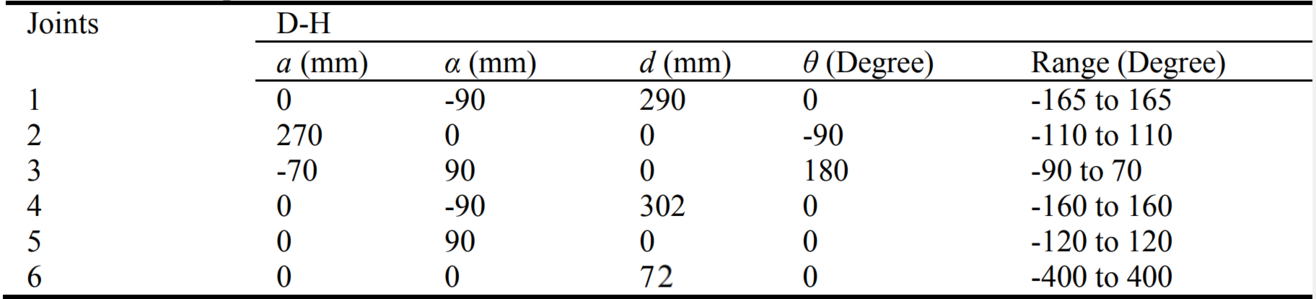
Step 3: Get D-H Parameters
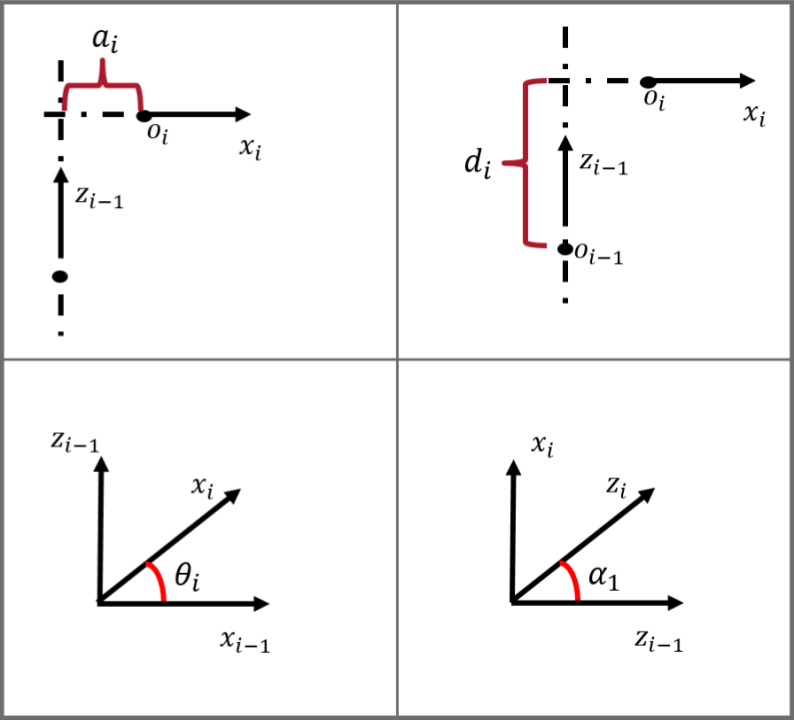
Now enter the 4 DH parameters into the tool shown below.
| link | a | alpha | d | theta | Matrix | |
|---|---|---|---|---|---|---|
|
|
Step 4: Get Transformation matrix
Use this Transformation matrix to calculate Inverse and Forward Kinematics.
T = [[l.name]] *
T = (I)
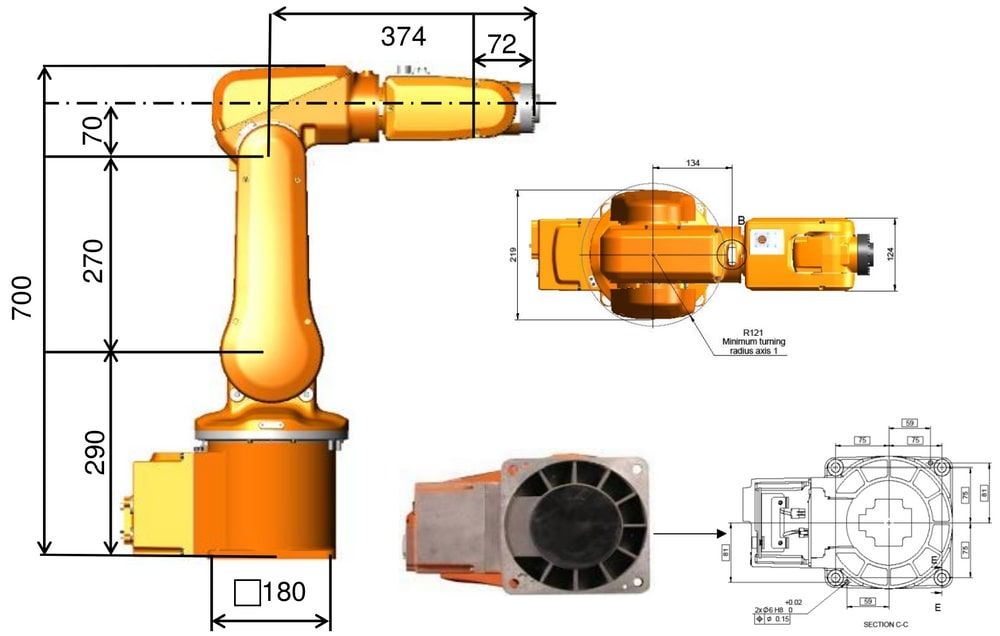
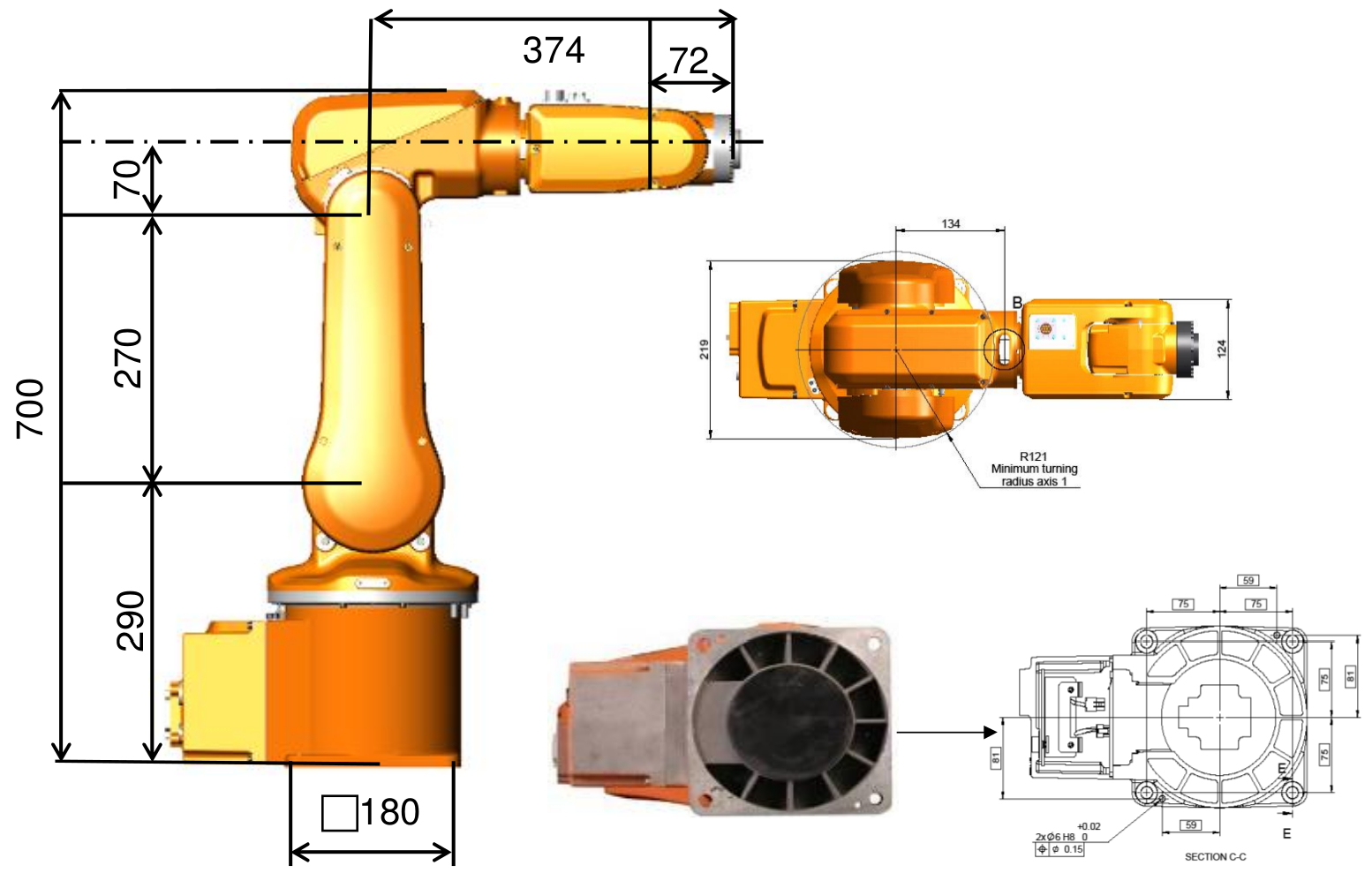
More Info about Demo Robot
The Example DH parameters are for ABB IRB120
Do you want to remove?
Do you want to remove [[link_to_remove_name]]
Confirm to replace all the data?
Demo Example will replace all the links existing in the list.
All the links/data entered in the table
will be removed.
Do you want to continue ?